Precision Servo DC Motor 46S / 185-8A

Taybetmendiyên bingehîn ên motora servo DC: (modelên din, performans dikare were xweş kirin)
| 1. Voltaja binavkirî: | DC 7.4V | 5. Leza nirxkirî: | ≥ 2600 rpm |
| 2. Rêjeya voltaja xebitandinê: | DC 7.4V-13V | 6. Astengkirina niha: | ≤2.5A |
| 3. Hêza nirxdar: | 25W | 7. Niha barkirin: | ≥1A |
| 4.Rewşa zivirî: | Mîlî derana CW li jor e | 8. Paqijkirina şaft: | ≤1.0mm |
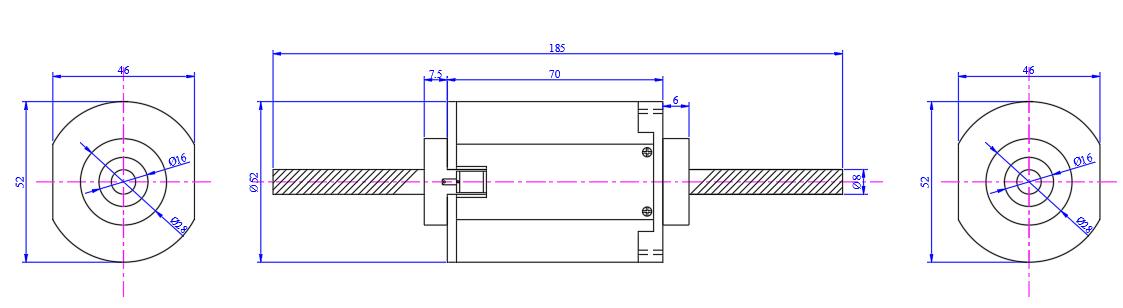
diagram xuya Product
Expiration-dem
Ji roja hilberînê ve, heyama karanîna ewle ya hilberê 10 sal e, û dema xebata domdar ≥ 2000 demjimêr e.
taybetmendiyên Product
1.Compact, design-saving space;
2.Avaniya hilgirtina topê;
3.Jiyana karûbarê dirêj a firçeyê;
4. Gihîştina derve ya firçeyan rê dide veguheztina hêsan ku jiyana motorê bêtir dirêj bike;
5.High starting torque;
6.Frêna dînamîk ku zûtir raweste;
7.Zivirandina vegere;
8.Simple girêdana du-wire;
Insulasyona 9.Class F, komutatorê welding germahiya bilind.
10.Performansa bilind, performansa lêçûna bilind û destwerdana kêm.
Applications
Ew bi berfirehî di warên xaniyê biaqil, cîhazên bijîjkî yên rast, ajokera otomobîlê, hilberên elektronîkî yên xerîdar, amûrên lênihêrîna kesane, masaj û lênihêrîna tenduristî, veguheztina robotê aqilmend, otomasyona pîşesaziyê, alavên mekanîkî yên otomatîk, hilberên dîjîtal, hwd de tê bikar anîn.
illustration Performance



Pergala servo: Ew pergalek kontrolê ya otomatîkî ye ku dihêle ku mîqdarên kontrolkirî yên derketinê yên wekî pozîsyon, rêgez, û rewşa tiştekê bişopînin ku her guheztina armanca têketinê (an nirxa hatî dayîn) bişopînin. Erka sereke ya servo ev e ku hêzê li gorî hewcedariyên fermana kontrolê zêde bike, veguhezîne û birêkûpêk bike, da ku torque, lez û pozîsyona derketina ji hêla cîhaza ajotinê ve pir bi nermî û bi hêsanî were kontrol kirin.
Ji ber performansa xwe ya "servo", jê re motorek servo tête navandin. Fonksiyona wê ev e ku sînyala kontrolkirina voltaja têketinê veguhezîne guheztina goşeya derketinê û leza goşeyê ya li ser şaftê da ku cîhê kontrolê bimeşîne.
Prensîba DC Servo Motor
Prensîba xebatê ya motora servo DC bi bingehîn wekî ya motora DC ya asayî ye. Torque elektromagnetîk ji hêla çalakiya hewaya armature û herikîna magnetîkî ya valahiya hewayê ve tête çêkirin da ku motora servo bizivire. Bi gelemperî, rêbaza kontrolkirina armatureyê ji bo guheztina leza bi guheztina voltaja di heman demê de ku voltaja heyecanê domdar bimîne tê bikar anîn. Çiqas voltaja piçûktir be, leza wê jî kêm dibe û dema ku voltaj sifir be, zivirîna wê disekine. Ji ber ku dema voltaja sifir be, niha jî sifir e, ji ber vê yekê motor dê torque elektromagnetîk çê neke, ne jî diyardeya xwe-zivirandinê xuya dike.







